

出品|妙投 App
撰文|Odin
题图|特斯拉
本年 5月 20 日,一则特斯拉的新消息,让一众媒体沸腾起来:据报道指出,特斯拉在测试激光雷达 (LiDAR),然后,媒体们就闹起来了。

在本年 5月 20 日,特斯拉被发现在 Model Y 上测试激光雷达。图片来源:Grayson Brulte。
不少业内人士一直认为,“激光雷达”方案是自动驾驶汽车必不可少的重要部分,也由于由 Google Waymo 为首的 L4 级别自动驾驶汽车,均采用激光雷达方案,以至今天绝大部分 L2 级辅助驾驶汽车,也在积极引入激光雷达技术,想借此尽早实现真正的自动驾驶。
但一众车厂之中,就只有特斯拉坚持不引入激光雷达。特斯拉的 CEO 马斯克 (Elon Musk) 坚持,单凭相机摄像头带来的“视觉方案”(Pure Vision),就足以让自动驾驶汽车运作良好。没想到在今年五月,顽固如此的马斯克居然被发现在测试激光雷达?特斯拉的纯视觉路线,真的错了吗?
这次,Odin 会为大家剖析这次“激光 VS 视觉之争”,内容包括:
自动驾驶是否真的需要有激光雷达?
激光雷达在今天汽车产业上的意义是什么?
马斯克拒绝激光雷达,是否真的错了?
激光雷达是否特斯拉的软肋?
激光雷达对于自动驾驶的重要性
在讨论特斯拉路线是否错误之前,我们先来聊聊到底为什么业界认为激光雷达如此重要。
2020 年 6 月 2 日上午 6 时 44 分,一个光线不算很差的清晨,当大家都忙着通勤,一辆一辆的车子在高速路上飞驰。突然,有辆偌大货车出了意外侧翻,横躺在路上,霸占了两条行车线,后车也不得不无奈切线避让。幸好货车司机无恙,离开车子、站在路旁静静地等待救援。

图片来源:量子位。
但突然有一台在自动驾驶状态的白色特斯拉,以时速 110 公里的高速、以非常拉风的姿态、不慌不忙、不闪不躲的姿态,笔直撞向这轮偌大的货车上(上图)。讽刺的是,这次意外与 2016 年在美国发生的另一次致命意外十分相似:同样的白色货车,同样地横躺路上,同样是自动驾驶系统完全没意图回避或减速,直接就撞上去了。
这两次情况非常相似的意外,证明特斯拉的视觉系统有着巨大的安全隐患。
诚然,特斯拉的视觉路线以汽车摄像头为主,摄像头会拍下汽车四周路况的视频画面,再通过人工智能算法,识别画面里的各种事物,并进一步判断这些事物的位置与距离,从而计算汽车最佳的驾驶路径。这就是我们经常说的“计算机视觉” (Computer Vision, CV) 路线。可是,摄像头本身并没有测量距离的能力,因此视觉系统无法直接感知障碍物,只能完全依赖算法和摄像头成像来回避障碍。
由于视觉系统需要一帧一帧地识别海量图像,电脑需要在短时间处理庞大的图像信息,对算法、硬件和图像的质量,均有着苛刻要求;倘若算法出了毛病、电脑硬件出现问题、甚至因光照环境不佳,摄像头无法拍出精准的画面,有可能导致严重意外。2016 年发生的致命事故,特斯拉解释其原因是系统无法在晴朗的天气下察觉到白色的车身所致;在 2020 年,同样的情况再次发生。
因此,理想汽车李想曾在社交平台上表示:
视觉在这个层面的进展几乎停滞,哪怕是动态,车辆以外的识别率也低于 80%,千万别真当自动驾驶来使用。
尽管特斯拉仍然不愿引入激光雷达,但他们并非不知道视觉算法的局限,因而曾在旗下的汽车里加入毫米波雷达 (mmWave Radar),作为冗余的感知系统,弥补视觉系统的不足,但意外仍然继续发生。
业界鉴于 Google Waymo 与百度等自动驾驶的企业,均使用精度更高的激光雷达;所以业界一直也主张特斯拉应该引入激光雷达,来加强安全性能。
今年 5月,特斯拉突然被发现在测试激光雷达,有汽车媒体因此视之为“特斯拉投降激光雷达“。
为何特斯拉坚持不用激光雷达?
为什么特斯拉测试激光雷达,会惹来媒体的高度关注?
特斯拉是目前自动驾驶的领导者,他们的举措自然成为业界的焦点,因此,他们也一直受到媒体、业界乃至华尔街的巨大压力。早前 Autopilot 几度发生致命意外后,不少媒体纷纷归咎于特斯拉没有激光雷达。根据彭博报道,摩根士丹利分析师 Adam Jonas 也指马斯克拒绝激光雷达的决定,鲁莽而过于冒险;Cowen & Co. 的分析师 Jeff Osborne 则认为特斯拉的纯视觉路线,不可能会成功。
但尽管马斯克一直受压,却仍然坚持不用激光雷达,可见这绝对不是一个草率的决定。
据马斯克的说法,激光雷达既昂贵又没有必要,只要攻克视觉的技术难关,就会发现它毫无价值。但 InvestorPlace 分析师 Luke Lango 却认为,马斯克只是嫌激光雷达成本太高而已。
当特斯拉在 2010 年代初开始推动自动驾驶时,单个激光雷达的售价曾高达 48.5 万元人民币。但到了 2021 年,售价已下调至约 6500 元人民币;而且十年内更会跌至约 650 元人民币。因此, Lango 认定“马斯克错了”。
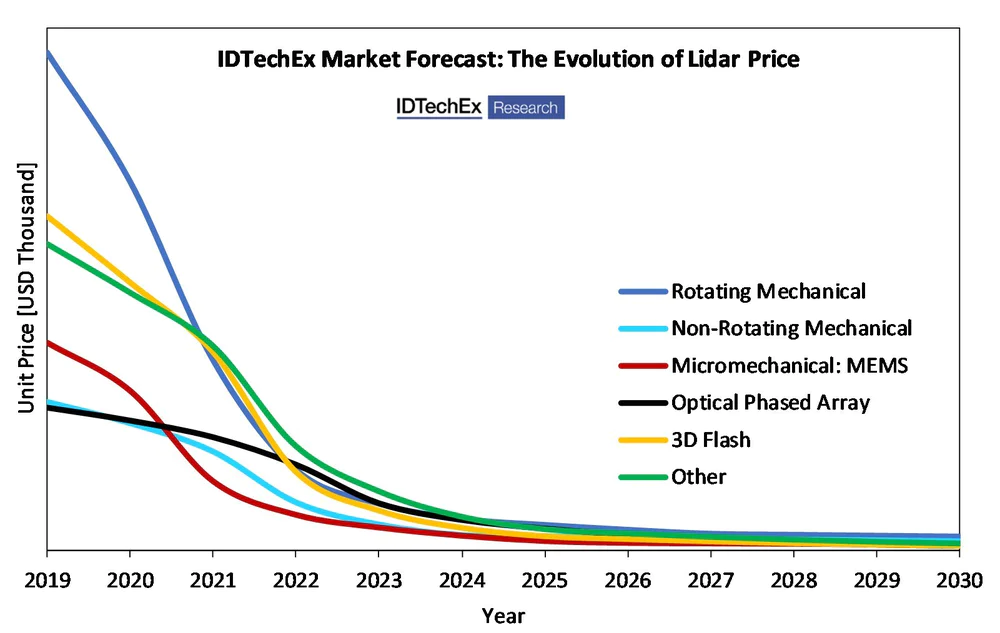
图片来源:IDTechEX Market Forecast。
可是,既然大家都认为激光雷达售价越来越便宜(上图),但为什么马斯克仍然坚持不用?这可能与马斯克的控制欲有一定关系。
众所周知,马斯克非常重视核心技术的掌控,他们早就掌握了被视为电动车核心技术的三电技术(电池、电机和电控)。此外,特斯拉最初依赖 Mobileye 提供的人工智能芯片和算法,但为了自主核心技术,在 2017 年后就改用自研的算法,后来更开发自家的 FSD 自动驾驶芯片。所以,有媒体认为特斯拉为了软硬件的自主控制力,才坚持采用自主的纯视觉路线。
偏偏在当特斯拉嫌弃激光雷达成本太高而弃用之时,不少中国车企却积极关注激光雷达,并吸引大量中国科技公司开发激光雷达,使中国车企在激光雷达阵营的话语权激增,也使“视觉 vs 激光”路线之争,增加了新的变数。
路线之争背后的战略意义?
当大量国产厂商进入激光雷达市场,导致海外的激光雷达大厂的份额,在去年年初快速下滑,著名大厂 Velodyne 甚至要在中国区进行裁员,并被视为国产激光雷达的首次胜利。后来,华为推出廉价的 96 线高精密激光雷达,不少媒体更跟风炒作,指华为动了特斯拉的奶酪,视觉路线技术已成鸡肋。
诚然,在目前的汽车赛道里,激光雷达是中国少数已拥有一定优势的板块。虽然据不少车企高层的说法,国产激光雷达尽管在技术上仍然比不上欧美大厂,但在成本和售后服务上有着明显的优势。因此,近年已有不少分析认为,国产激光雷达将借性价比为突破口,实现国产替代。

图片来源:车东西。
在这情势下,倘若特斯拉真的要引入廉价的激光雷达,他们就只能采用中国产品。但在目前国产车企扎堆国产激光雷达之时(上图),特斯拉不可能无法完全掌控激光雷达的供应,也无法在这个赛道上占得优势。因此,36kr 因而表示:马斯克这回要“摸着中国车企过河了”。
所以,特斯拉改用激光雷达,会成为中国车企弯道超车的黄金机会吗?其实整件事情不单纯。
问题的关键是:特斯拉真的放弃纯视觉路线,转投激光雷达阵营吗?

彭博引述分析师 Sam Abuelsamid 的说法,指特斯拉测试激光雷达的原因,大概率是作为验证视觉技术的手段,而不是真的要在量产的车型中配置激光雷达。而外媒 InsideEV 也透露,特斯拉测试激光雷达并不意外,不少原型车本来就有相关配置,而且不少专家也相信,特斯拉其实只是通过激光雷达来训练视觉技术,借此提高系统感知精度。
特斯拉投降激光雷达?马斯克这回要摸着中国车企过河了?
都散了吧。
因为在一周后,特斯拉宣布把北美交付的 Model 3 和 Model Y 的毫米波雷达移除,仅标配视觉和超声波系统,象征特斯拉将会开始全面推动“纯视觉路线”。
视觉才是自动驾驶的主角
尽管特斯拉的确一直在测试激光雷达,但为什么他们不但没有在自家的量产车型上配置,反而连原来的毫米波雷达也丢了,往纯视觉路线越走越远?
个中原因,其实所谓的“视觉 vs 激光”之争,并不是一个简单的二分法。

虎嗅先前曾报道:2018 年 3 月 18 日晚上,一辆 Uber 自动驾驶测试车辆在亚利桑那州坦佩市的既定测试路线上行进,在车速 45 英里的状态下,行人开始推着自行车横穿马路,但 Uber 的自动驾驶车并没有选择减速,车上的安全员也没有踩下刹车,结果造成致命意外。

Uber 自动驾驶测试汽车意外前,激光雷达的感应状态。资料来自 NTST。
在这次事故里,尽管这台 Uber 的自动驾驶汽车已包含了视觉、激光雷达及毫米波雷达三大类传感器,而且在美国运输安全部的调查报告由,证明了激光雷达在低亮度环境下,比视觉更为可靠。可是,由于激光无法正确识别事物,不知道涉事的行人正准备横马过路,反而误以为她仅仅是停在路边的汽车,因而选择继续全速前进,最终来不及刹车,导致意外发生。
这次致命意外凸显了没有视觉识别能力的激光雷达,也有着巨大的安全隐患。
视频来自 Wes Bard,中文字幕为 Google 机翻。
事实上,现代的交通体系本来就基于人类视觉而建立,无论是马路的设计、汽车与行人的习惯、以至各种行车线、路牌和灯号,也是为了让我们“看得见”而设。在车联网 (V2X) 完善之前,想要自动驾驶汽车更为安全的唯一方法,就只有拥有与人类相似的视觉系统,适应人类的交通体系(上方视颜)。
目前自动驾驶汽车为何要采用视觉体系?就是要像人类一样,通过视觉来识别人类的交通体系。但偏偏激光雷达只能感知激光,无法分辨环境的色彩,也无法感知平面图案,因此,识别事物的能力远远低于视觉,适应人类交通体系的能力,也远远弱于视觉。
换言之,视觉才是自动驾驶的主角、绝对的 C 位,没有之一。由于视觉是自动驾驶最核心的技术,即使激光雷达再便宜、再强大,今天绝大部分的自动驾驶系统,仍然以视觉系统为主导;车企没有过硬的视觉技术,也不可能开发出具竞争力的自动驾驶汽车。
都说激光雷达好,但偏偏没有人采用
但既然如此,那为什么这么多专家,仍然认为自动驾驶必须使用激光雷达?他们其实并不是说“视觉”没用,而是主张多传感器融合。
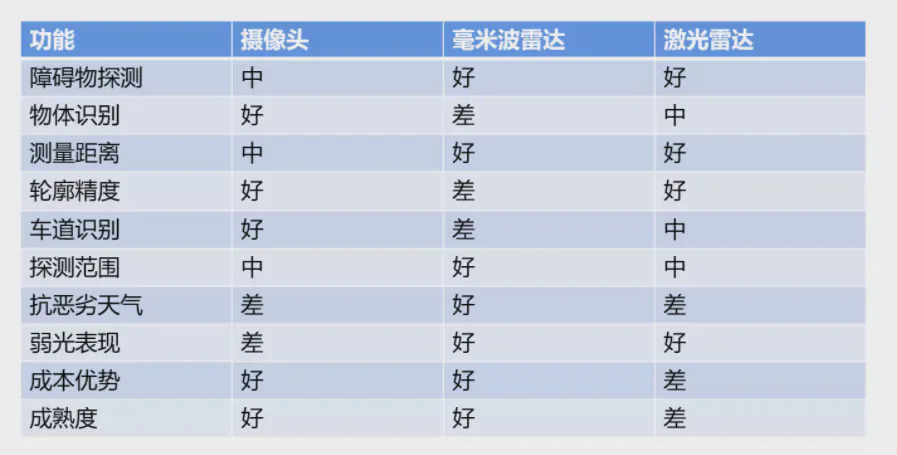
图片来源: 阿尔法工场研究院。
事实上,不同的传感器有不同的优点和缺点,视觉技术拥有出色的图像识别能力,但在测量距离和感知障碍物上较弱;相反,激光雷达拥有出色的测量距离和感知障碍物能力,但在识别图像的能力较弱(上图)。如果两个传感器能互补不足的话,不是会让自动驾驶汽车更为安全吗?
也因为如此,特斯拉才会利用激光雷达的精准测距能力,来训练和验证本来不善于测距的视觉系统。可是,既然特斯拉也用激光雷达来训练视觉,那为什么他们不为消费者的安全着想,在车上配置激光雷达作为冗余?这样就能在精度不高的视觉系统出错之时,也能通过激光雷达来补救吧?
当我们觉得马斯克太抠门,所以只有特斯拉不愿车上配置激光雷达之时,其实包括蔚来、理想以至奔驰、宝马甚至是劳斯莱斯,通通也没有在量产车型上配置激光雷达。
尽管不少车企强调自动驾驶必需要有激光雷达,也不断加大在激光雷达的投资,但偏偏他们却未曾在量产车型上大规模引入;他们也仅仅像特斯拉一样,仅进行小规模测试而已。

直至早前小鹏汽车推出 P5,才算是中国车企在 L2 级别的自动驾驶里,被产业视为大规模使用车规激光雷达的首次尝试(注)。但小鹏所搭载的大疆激光雷达,业界的评价也不太高,认为它可靠性不太高,双棱镜设计也不利于高速行驶时采集数据。
(注:奥迪在 2020 曾推出一款搭载激光雷达的 A8,但里面激光雷达根本未有解锁,根本不能用。)
视觉不可信,但激光也不可靠
为什么这些车企认为自动驾驶汽车非得用激光雷达不可,但他们却迟迟不愿大规模引入?原因除了是激光雷达的成本高昂,更大的问题是它仍然不够可靠。
棱镜式混合固态的激光雷达。图片来源:Pepperl+Fuchs Group。
要知道激光雷达在远距离下仍然能实现高度的感知精度,原因是使用了高度指向性的激光。但由于激光指向性太高,导致激光雷达的视野范围太窄,无法感知整个四周环境,获得立体地图;因此,激光雷达大多让激光以旋转方式扫描四周环境,扩大感知范围。但由于激光雷达必须通过扫描才能获得四周的立体地图,所以最初的激光雷达,大多采用能高速旋转的机械结构(上图)。
这种活动式的机械激光雷达,在一般环境下也许不会遇上太大问题,但当应用在汽车上,就会遇上各种问题。毕竟汽车在不同的路况行驶,难免出现频繁的震动,这些活动部件就更容易磨损和松脱,并影响测量精度。据国金证券的资料指出,机械式激光雷达平均失效时间仅 1000-3000 小时,与车规要求的最低 13000 小时相距甚远,根本难以大规模引入。
结果,最初车企只能小规模测试激光雷达,直至近年出现通过微型电机 (MEMS)、棱镜或转镜方式的混合固态结构,大幅减少了活动部件。因此,激光雷达可靠性也得到了一定的提高,满足车规的需要,才开始得到车企的重视。

但尽管如此,这些混合固态激光雷达仍然不是真正的固态结构,里面仍然有大量的活动部件,可靠性仍然备受业界争议。
更值得深思的是,由于这些混合固态激光雷达,仍然尚未在汽车上大规模应用,因此它们在自动驾驶上的可靠性,根本就未有得到充分验证,更没有足够的安全测试数据。没有人能保证这些装备了激光雷达的自动驾驶汽车,何时会突然失效、或是出现严重误差,导致意外。
因此,业界一直也认为,在长期来说激光雷达的主流形态,仍是没有活动固件的“真”固态激光雷达,例如面阵闪光雷达、或相位控制阵列雷达等。
汽车之心就指出,目前以 MEMS 为首的混合固态激光雷达,根本就只是过渡性的产品而已。而海外激光雷达大厂 Ouster 也表示,混合固态路线只是阶段性’的缓兵之计,但这绝对不是车厂最后的选择,决战还远没有开始。
谁在激光雷达路线上“豪赌”?
既然现在的激光雷达仅仅是过渡性产品,而且可靠性也不太好,固态激光雷达技术又尚未成熟,所以激光雷达的核心战场,根本不应该是如何降低激光雷达的成本,而是研发新一代的技术。

图片来源:中信证券 via 半导体行业观察。
目前,Velodyne 或 Ouster 等欧美大厂虽然在价格上没有优势,但他们却站在技术技术上的第一梯队(上图)。
相反,尽管目前国产厂商在激光雷达赛道上已有一定优势,但先前我们已说过,这个优势很大程度上并不在于技术,而在于性价比和售后服务。
举例说,尽管华为和大疆已开发出具竞争力的激光雷达,但他们所走的技术路线,其实是被业界认为门槛低、容易上手、没有太多技术创新的混合固态路线,这些技术根本就不适应现在的固态激光雷达发展趋势。换言之,他们的竞争力很大程度上来自“价廉物美”的产品而已。
当然,要开发价廉物美的产品,也需要有高度的技术能力;而且这些国产厂商在积极降低这些过渡性产品的成本之余,其实也在同时开发新式激光雷达。他们的技术水平,其实也不一定就会输给外国大厂,但与此同时,他们也不一定能在技术上占得优势。
由此看来,国产厂商原来的“优势”,其实一点也不牢固。

更麻烦的是,虽然有媒体曾经把特斯拉坚持纯视觉路线,称之为“豪赌”,但实际上押注混合固态激光雷达的国产厂商,才是真正的豪赌。
事实上,由于目前激光雷达的技术形态尚未定型,国产厂商花大钱投资,通过规模经济所构建的价格优势,很可能会随着固态激光雷达技术的普及,变得一文不值。
时间站在掌握数据的一方
与此同时,也由于目前激光雷达的技术形态根本尚未定形,特斯拉也根本不用急于下注,因为他们未来真的要改用激光雷达,也完全来得及。
因为时间站在掌握数据的一方,而特斯拉则掌握了数据。

先前我们提过,混合固态激光雷达尚未大规模出货,因而缺乏足够的测试数据,车企也难以针对可能出现的弱点和限制,进一步改善算法。因此,即使未来激光雷达的发展再快,车企仍然要慢慢积累数据,改善算法;当他们要进一步升级为固态激光雷达,还要重新累积新技术的测试数据。故此,特斯拉等着激光雷达技术路线定型后才再引入,也完全来得及。
另一方面,特斯拉的视觉技术再不可信他好,好歹他们也开发视觉系统多年,早就积累了大量数据。即便视觉系统的精度再低也好,他们很清楚视觉系统的弱点在哪里,也能投入大量的数据进行调整和训练。
众所周知,自动驾驶极度依赖人工智能,而人工智能极度依赖海量数据。
现在,特斯拉就站在掌握数据的一方。
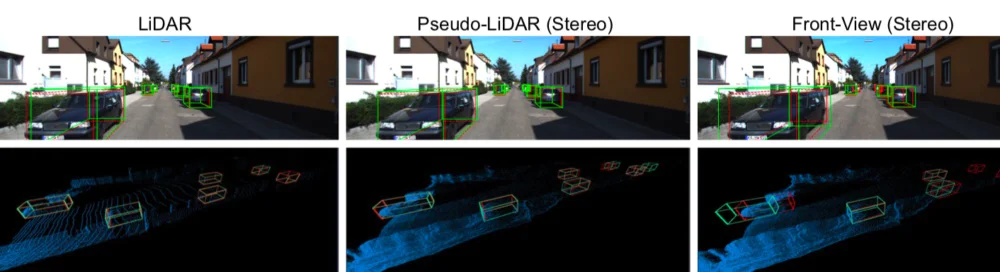
图片来源:Clean Future。
尽管我们老是说视觉有各种缺陷,在安全性上无法与激光雷达相比;但据报道指出,特斯拉在去年在开发一种“伪激光雷达” (Pseudo-LiDAR) 的技术,以此缩短纯视觉技术架构与激光雷达间的性能差距(上图)。特斯拉高级人工智能总监 Andrej Karpathy 更强调,在“伪激光雷达”下,视觉和激光雷达的差距正在不断缩小。
因此,即使特斯拉在激光雷达路线上真的错了也没关系。马斯克才在推特里豪言:
随着视觉的快速发展,它将远远把激光雷达甩在后面。
毕竟即使激光雷达发展再快也好,竞争对手也少不了视觉技术。由于特斯拉专注开发纯视觉路线,足以让他们在视觉领域甩开对手,即使他们在激光雷达路线上落后于人,也有足够的时间从后追上。
激光雷达赛道前景仍然不明
事实上,激光雷达根本就不是特斯拉的软肋,而是整个自动驾驶产业的软肋。自动驾驶技术少不了视觉,但就因为目前的视觉技术不堪大任,所以业界才想借助激光雷达来改善可靠性。
可是,当激光雷达这根救命索也不够可靠,业界还有任何方法来改善自动驾驶的可靠性?
故此,无论马斯克拒绝激光雷达路线是否正确,也不足以为特斯拉带来严重的后果。因为自动驾驶的核心战场仍然是视觉,而在视觉技术上领先的特斯拉,拥有足够大的容错空间,纠正马斯克这次所作出的决定。
相反,激光雷达自身形态尚未明确,根本不可能成为国产厂商从后超车的“弯道”所在。
无论小鹏也好、华为也好、大疆也好,真的要在自动驾驶这个前沿科技赛道上超越特斯拉,绝不可能单靠低成本的激光雷达,是实实在在地研发前沿技术。
评论