
这其实是我第二次体验 Level 4 能力的无人驾驶车,也就是全程无需人类介入的自动驾驶。但这一次的体验,却比上次试乘百度无人车有趣很多,在这一次的试乘中,路面上突然出现了一群鹅。
还是先简单科普一下自动驾驶,目前各家研发自动驾驶时,一般都会认同这样一个分级制度(其实有两种但大致相同),来区分自动驾驶(完全不用人)和驾驶辅助(主要要靠人)的技术界线。详细的分级可以看下图。
其实这样复杂的分级也可以分为两大类,即上面提到的纯自动驾驶和驾驶辅助。分成两大类的原因在于,目前正在做自动驾驶的厂商,基本都倾向于做这两大类的试验,自动驾驶的安全责任在于厂商,驾驶辅助的安全责任在驾驶者。不做 level 3 那样的有条件自动驾驶的原因也很简单:不好划分责任,出了事儿不知道把锅甩给谁。
昨天在武汉,参加了雷诺的品牌体验日,活动上雷诺高管介绍了下雷诺这个品牌的发展历史,展望了下雷诺在和东风合作后的发展愿景,之后就让媒体试驾了下雷诺的 SUV 科雷傲并且在一个度假园区内展示了一下自家正在研发的纯电动自动驾驶车。

既然我们是一家科技向媒体,还是把关注点放在这辆自动驾驶车上。之前写过很多自动驾驶车的报道,大部分读者对于自动驾驶车的印象其实起源于 Google 的自动驾驶试驾车。即一个看上去挺可爱的车,车顶顶一个蘑菇(64 线激光雷达)。
但随着越来越多的传统车厂入局自动驾驶,开始自动驾驶路试。实现自动驾驶的传感器方案也发生了改变。自动驾驶车看上去不再那么特别,外观上更加倾向于经过细微改变的改装车。
如果把 L4 级别的全自动驾驶技术分为最简单的几块,应该包括:感知、决策和控制三部分。我们在自动驾驶车上看到的各种“蘑菇”,其实就是用来感知车辆周围环境的传感器。
对于自动驾驶车来说,传感器的方案组合至关重要,也是最为明显能看出各家无人车区别的一部分。
将感知这一部分进一步拆分,其实是两个技术细节:感和知。感是通过传感器收集车辆周围的数据,而知是通过车载电脑来对数据进行处理,让车辆知道车辆周围究竟是什么东西。
但车载电脑的运算速度有限,传感器用的越多,车载电脑的运算处理压力就越大,做出驾驶决策和最终的控制就需要越多的时间,自动驾驶的反应速度就越慢。
也就是说,在保证安全和功能性的前提下,尽量简化传感器搭配,是提升自动驾驶运算和决策效率的最佳方式。
铺垫上面这么多科普的原因,昨天体验的雷诺自动驾驶车,在传感器方案上,确实已经做到相当简化的地步,整个车看起来也和普通的量产车型没有太多区别。

雷诺的自动驾驶车是基于雷诺研发的一款叫做 ZOE EV 的纯电动车,没在中国发售,2017 款的英国起售价是 1.4 万英镑(约合人民币 12.3 万元),顶配车型 2.2 万英镑(约合人民币 19.3 万元),顶配车型电池容量为 40 千瓦时,标定的续航里程是 402 公里(极寒天气为200公里),单次充电需要 3-4 小时。
这小车在欧洲挺火,2015 年,ZOE EV 年度销量较 2014 年上涨了 67%,2016 年年底在欧洲电动汽车市场的占有率为 20%,在法国本土市场占有率则高达 55%。
虽然这辆车在中国没有正式开售,但是体验用的自动驾驶车是由这款车改装的。

改装的自动驾驶车在车顶没有“蘑菇”,而是放置了 Laird 的通讯天线,保证车辆定位,挡风玻璃上沿安装了摄像头的视觉传感器,可能用于避障和跟随道路划线。车头的正前方和左右两侧共安装了 3 个激光雷达。

展示现场雷诺并没有公布激光雷达的型号,问了下测试小哥,他对我微微一笑说这个要保密不能透露。

但实际上在网上就能轻松查到这个激光雷达的参数信息。雷诺无人车上的,使用的是德国 ibeo 的 LUX 4 线或者 8 线激光雷达。这款雷达的视角有 110°,探测距离在 0.3m 至 200 m。车上正面的激光雷达安装距离比较靠下,接近传统汽车的毫米波雷达的位置,可以推测这些激光雷达的主要功能只感知行进路上的障碍。
激光雷达有 4 线、8 线、16 线、64 线等等,线数越少代表描绘出来的环境精度越低,车载电脑的数据处理难度也就越低。因为雷诺无人车的激光雷达主要作用在于避障,能够感知障碍即可,所以稍微低一些的精度能够直接提升车载电脑的运算速度,进而让自动驾驶车更加像个老司机,有更快的反应能力。

用于运算的车载电脑放在车辆后备箱,不让拍照。车内经过了简单的改装,中控上方有一个显示屏,能够显示行进路线和通过传感器实时感知的周围环境。当人走过车头,屏幕上会显示一个绿色的方框,感知出路人(对于无人车来说就是障碍物)。
开车上路。

路试的距离不长,且是一个封闭路段,但有一种曲径通幽的感觉,用人话说就是路窄,拐弯多且大。
整套自动驾驶方案的逻辑不难理解,车辆依靠已经绘制好的高精度地图行进,传感器负责感知路面周围的障碍,如果有障碍就停下来,障碍走了继续行进。
实测的感受是,雷诺在这个路段使用的地图还是精度很高的,车辆会严格按照地图的路线,行进在道路中间。车辆的传感器和车载电脑的感知和决策速度很快。试乘时候,刚好一个测试员毫无意识的突然走到了道路中间,车辆迅速刹停,没有造成任何危险的情况。

随后雷诺颇具诚意的找来了一个海外高管,充当人肉障碍物,在车的前方过马路,无人车也能比较远的开始缓慢减速,并当障碍通过后,逐渐恢复到既定速度。
有趣的是,刚好测试的路段是一个旅游区的人造湖边,我们测试的过程中,一群鹅就上岸了,要过马路,但自动驾驶车没有受到影响。

但整个测试,车辆的速度被限制在了 20 km/h,属于低速无人车的类型。测试路段也属于封闭道路,难度不算很高。可以说,演示的技术还很基础。另外,目前展示的自动驾驶方案,路线规划和路线指引,主要还是依靠高精度地图来完成,这也就意味着,要想真正让技术落地,还很难。
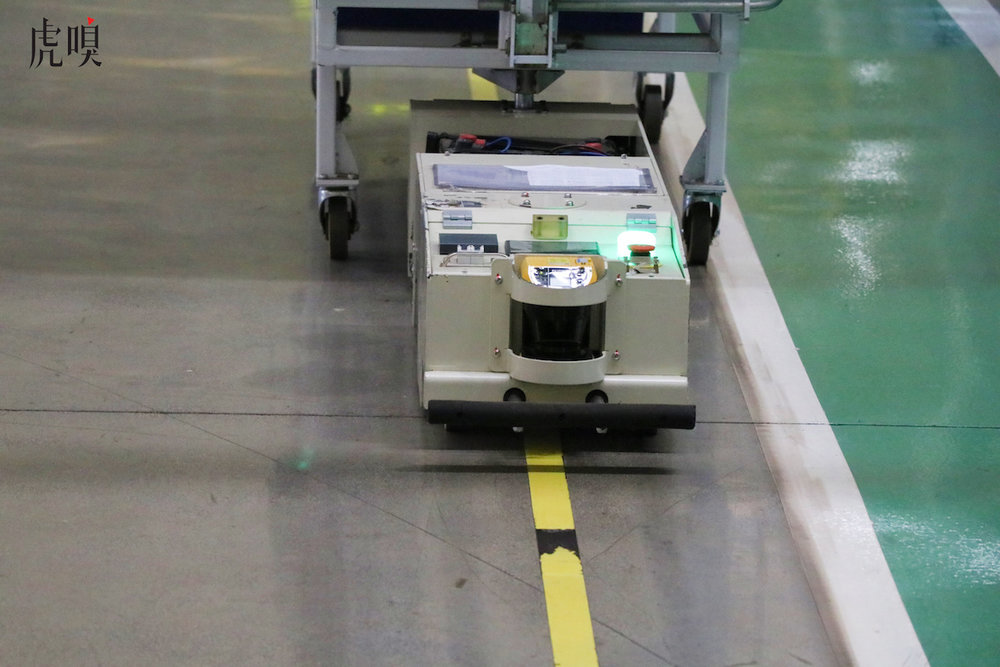
自动驾驶试乘结束后,又去参观了雷诺的工厂。整车组装的厂房内,零部件通过自动驾驶的货架跟随工人行进,在无干扰的工厂环境内,运行良好。
其实工厂内的自动驾驶给了自动驾驶汽车比较好的发展思路。当高速开放路段的自动驾驶比较难实现时,对于像雷诺这样的传统车厂,把研发重心放在低速园区内自动驾驶车上,更好实现盈利。另一方面,从雷诺这次展示的比较保守且成本较低的自动驾驶传感器方案可以看出,这样的传感器方案,用在高级别驾驶辅助上也是适用的,逐渐在自己的新款车型上,安装不会让人觉得突兀的传感器,在用户使用更高级别驾驶辅助的同时进行技术的深度学习,明显更适合积累真实的驾驶数据,方便自动驾驶算法的调校。
文章结尾,其实想问问读者们对自动驾驶的看法。各家厂商都在追风口,你们怎么看这个技术?