
本文来自微信公众号: 董车会 ,作者:关注明日出行的,原文标题:《时隔十年,Google Maps 迎来史诗级大更新!导航变 3D,搜索变对话》
除了微信、WhatsApp这类社交产品,全球使用最频繁的App里,地图大概稳居前列。
但这类工具型APP长期以来,也是更新最慢的那个。
据统计,Google Maps每月活跃用户已经超过20亿,几乎是互联网史上覆盖范围最广的单一产品之一。

但把5年前的Google Maps截图和今天放在一起看,差别其实不大,都是相同的蓝色路线和白色底图,这么大的产品,过去很长一段时间里,更新都显得克制,甚至有点停滞。
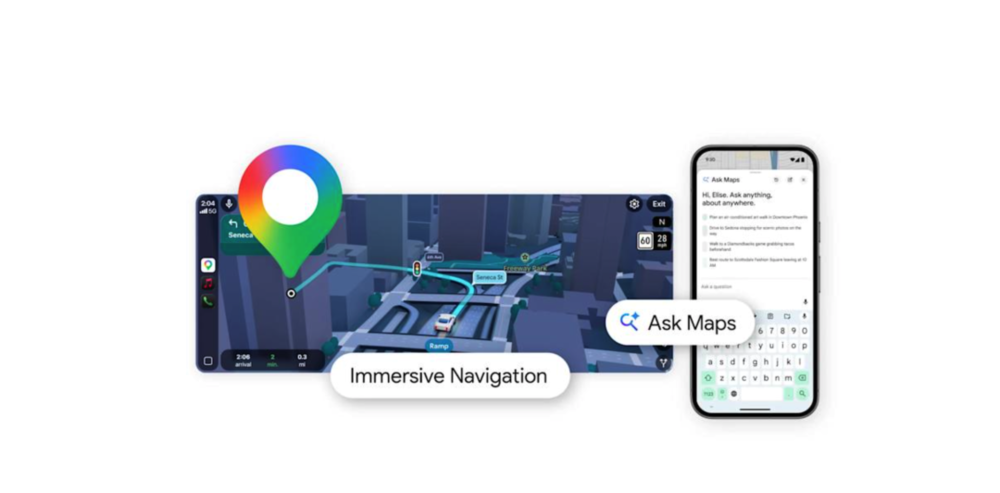
直到昨天,Google宣布将对Google Maps进行「10年来最重要的一次导航升级」,把Gemini AI和地图能力深度结合,推出了两个核心功能:沉浸式导航和Ask Maps。
前者重做了视觉层,用3D实景渲染取代平面路线图;后者重做了交互层,用自然语言对话取代关键词搜索框。
这次更新可以看作是谷歌对「地图能做什么」这个问题的重新回答。
过去,地图的任务很单纯,就是告诉你怎么走。现在,Google想把它做成一个真正意义上的出行助手。
它不仅要能听懂你在说什么,还得理解你真正想要什么,甚至提前替你安排接下来的路程、停留点和行程节奏。
焕然一新
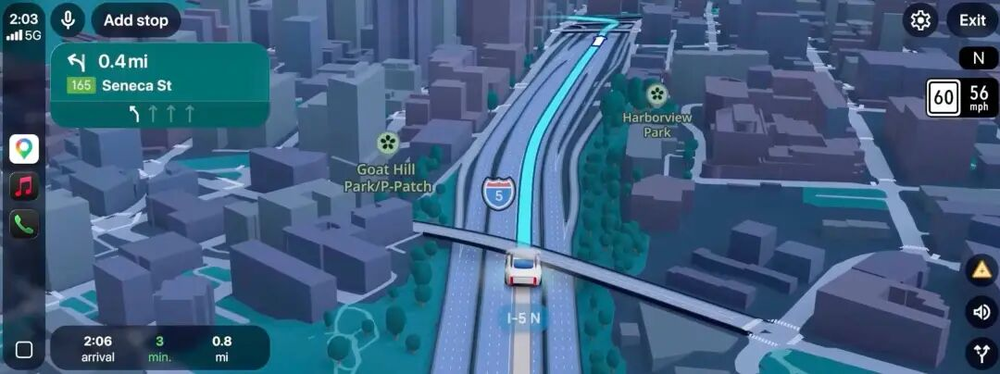
Google Maps更新的沉浸式导航带来的第一个感受,是焕然一新。
新版导航界面引入了动态3D视图,借助Street View的街景数据和航拍影像,对周边环境进行重建。
建筑、立交桥、绿化带,不再只是平面的抽象符号,而是以更接近真实世界的形态出现在屏幕上。
Gemini在这里承担的角色,不只是把路线画得更花哨,而是参与空间理解,让地图从一张二维平面,变成一个能实时呈现道路关系的立体场景。
但这次更新的价值不只在于「好看」,更在于实用。
导航画面会实时高亮当前车道、人行横道、红绿灯和停车标志,帮助驾驶者在复杂路口更早做判断。
新加入的「透视建筑」功能也很有针对性。当车辆接近复杂转弯或需要连续变道的路段时,系统会自动调整视角和缩放比例,甚至透过前方建筑物的遮挡,提前让用户看清下一段路的结构。
这种设计相当实用,尤其在陌生城市里开车时,很多慌乱都来自「前面到底该并到哪条道」,而不是单纯的路不熟。

这次更新另一个值得注意的地方,是Google开始把路线变动的原因清楚。
Google Maps每秒都在处理来自全球的大量交通更新,持续修正路线、寻找更优解。可过去的体验常常是,路线突然变了,用户却不知道为什么。
现在,地图会主动解释原因,告诉你前方有事故、哪条路更堵、替代路线能省下多少时间。
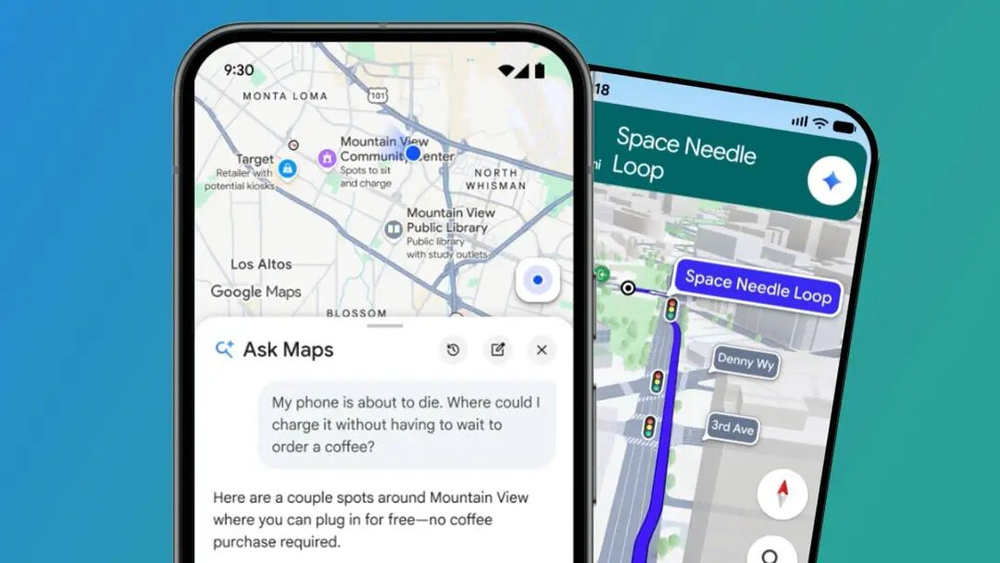
如果说沉浸式导航解决的是「怎么走」,那Ask Maps处理的就是「该去哪儿」。它真正改变的是地图和人的对话方式。

用户可以用自然语言提出复杂的现实问题,比如「车子快没电了,哪里可以充电又不用排队等咖啡?」或者「今晚有没有开着灯的公共网球场可以打球?」这类问题在以前的搜索框里几乎无解,因为它们包含多重条件、依赖实时信息,不是简单的关键词匹配能处理的。
Ask Maps想做的,就是把这类真实世界里的模糊需求,变成可以理解、可以回答的问题。
它背后的底座,是超过3亿个地点信息,以及5亿多用户持续贡献的评价、照片和状态更新。这让Ask Maps的推荐不只是搬运商家简介,也不是简单抓取官网文案,而是尽量建立在真实体验之上。
它的上限远不止于此。
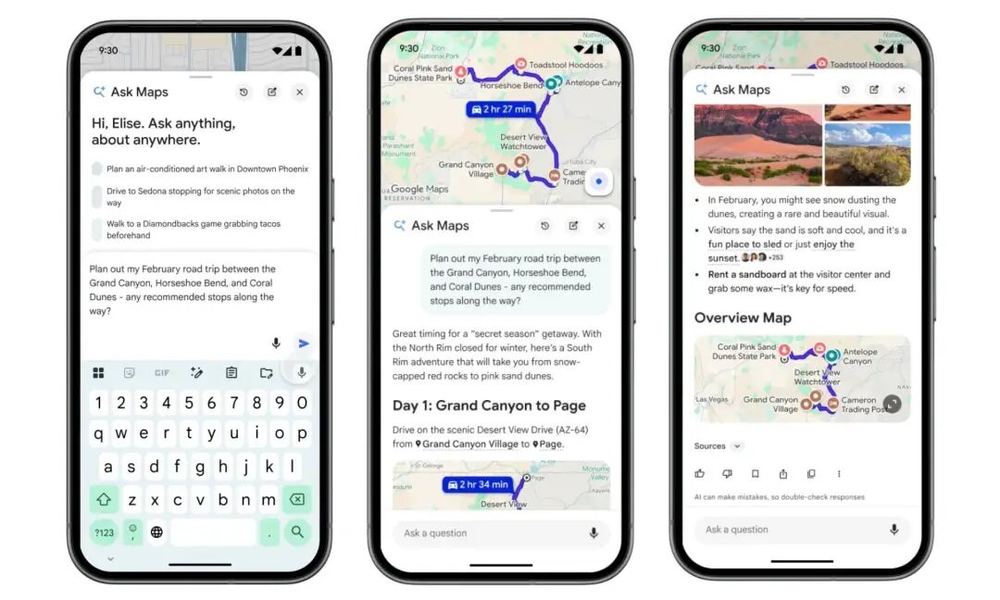
Ask Maps同样可以胜任多日旅行规划,比如你说「我要去大峡谷、马蹄湾和珊瑚沙丘,沿途有什么值得停留的地方?」,系统会给出分段路线、每段预计用时、沿途的收费路段信息,顺便补上那些传统导航不太会告诉你的细节,比如哪个停车场经常满位,哪条不太出名的小径反而值得绕过去看看。
更进一步,Ask Maps还试图提供「个性化」服务。
它会结合用户此前的搜索记录和收藏偏好,自动过滤掉那些大概率不合口味的选项。比如你问「我朋友从新乡曼哈屯过来找我,晚上7点,4个人,有没有氛围好一点的地方」,如果系统已经知道你平时偏好的口味,它给出的结果就会自然往这个方向倾斜,而不会甩给你一份笼统的热门榜单,让你自己一点点筛。
选好目的地后,这些结果还能一键转成导航路线,甚至直接在App里完成预订,再把信息发给朋友,它开始接手搜索、决策、预订和分享这一整串流程。
目前,Ask Maps已经率先在美国和印度向Android和iOS用户开放。沉浸式导航则会逐步扩展到Android Auto、搭载Google系统的车机,以及Apple CarPlay,覆盖更完整的驾驶场景。
另一个Level
谷歌的这次更新放在全球范围内无疑是一次重要的升级,但如果把视角拉回国内,高德地图和百度地图在很多方向上已经走得更远,方法也完全不同。
拿高德来说,它最近在北京上线的一个功能就很有代表性:实时显示路边停车位状态。
用户直接在地图上就能看到某条街哪些车位空着,哪些已经被占。这背后靠的不是单一数据源,而是高德自身的停车位置数据和城市级交通系统的联合判断。
这不是单纯的软件能力,而是一整套城市协同感知能力在地图上的落点。

AI交互层面,高德也早就不满足于做传统的语音助手。「小高老师」这个智能体,已经具备比较成熟语言感知功能,用户在嘈杂环境里发出指令,它能持续听、持续回应,中途打断也可以自然接上。
高德的另一个关键功能则是在安全方面,经常开高速的朋友想必都被高德提醒过「前车刹车,请减速」。
高德的「鹰眼守护系统」置了交通视觉语言大模型,可以实时分析周边上百辆车的动态信号,做群体异常检测。
一旦系统识别出风险,会通过语音播报和地图弹窗,给后方车辆发出秒级预警。
据报道,「鹰眼守护系统」上线后,G2京沪高速在2025年国庆期间日均万车事故数同比下降大约10%。

把谷歌和高德放在一起比较,或许容易得出一个简单的「高德更厉害」的结论,但两者的技术路线,其实是各自生长土壤的产物。
Google Maps的优势在于全球数据规模和AI底层能力。它积累的是覆盖全球的路网信息、多语言的用户评价体系,以及Gemini模型在语义理解上的深度能力。这使它在「通用场景」下的表现极为出色,能够理解复杂的自然语言问题并给出合理答案。
高德的优势则在于本土场景密度和数据协作能力。
中国独特的城市形态,高密度、多层立交、复杂的停车生态以及每年一度的春运级别交通压力,构成了极端的技术试炼场,倒逼出了更激进的功能落地。
鹰眼系统依赖的城市大脑数据、停车位状态感知依赖的市政基础设施接入,这些资源在其他国家和地区并不容易复制。
两者的差异与其说是「技术水平」的高低,不如说是「场景驱动」路径的不同。
谷歌做的是全球通用的导航助手,高德做的是深度嵌入中国城市生活的出行系统。