本文来自微信公众号: 42号电波 ,作者:兰博,编辑:James,原文标题:《ICRA 2026 划重点:物理 AI 时代到来、中国力量崛起、数据仍是核心卡点》
6月5日,为期5天的IEEE国际机器人与自动化会议(ICRA 2026)在奥地利维也纳落下帷幕。
作为全球机器人界最具影响力的盛会之一,本届大会有超过8,000名参会者来到现场,共收到4,947篇有效投稿,最终录用1,882篇,录用率为38.04%。
相比较2023年投稿3,125篇、录用1,345篇,43%的录用率来说,这届大会接收投稿与3年前相比大幅增加,但录用率反而降低了近5个百分点,整个具身行业越来越热闹的同时,大会的投稿录用门槛进一步提高。
这也反映出了会议的另一个底色,是行业大环境的变化。过去12个月里,全球经历了一场具身智能领域的创业潮,来自智能汽车、AI、消费电子等各领域人才正在加速涌入,同时宇树冲击上市,OpenAI重返机器人,资本与产业的热情来到了前所未有的高度。
站在这个节点上的ICRA,承载的意义已经远超学术交流,它更像是一场物理AI时代到来下的集体点卯。
最佳论文揭晓,华人学者大放异彩
在本届大会最受关注的最佳论文评选环节,CMU助理教授石冠亚团队的《OmniRetarget:Interaction-Preserving Data Generation for Humanoid Whole-Body Loco-Manipulation and Scene Interaction》在获得最佳论文奖的同时,也拿到了最佳操作与运动论文奖,这也是ICRA历史上少见的「双奖并出」。
该工作的出发点是,训练人形机器人常靠复刻人体动作,但人和机器身体结构差距大,传统方案容易出现滑脚、穿模,并且可能丢失人与环境、物体的互动细节。
所以团队推出了OmniRetarget动作重定向工具,专门保留所有接触与空间交互关系,生成合规运动轨迹,还能基于单段动作快速扩充适配各类机器人、地形与物件的训练数据。在实测下,生成8小时以上高质量动作样本,只用简单奖励机制,宇树G1机器人就能独立完成长达30秒连续跑酷、手持操作任务。
最佳自动化论文奖则由深圳大学特聘教授胡瑞珍团队的《IMR-LLM:Industrial Multi-Robot Task Planning and Program Generation using Large Language Models》拿到。
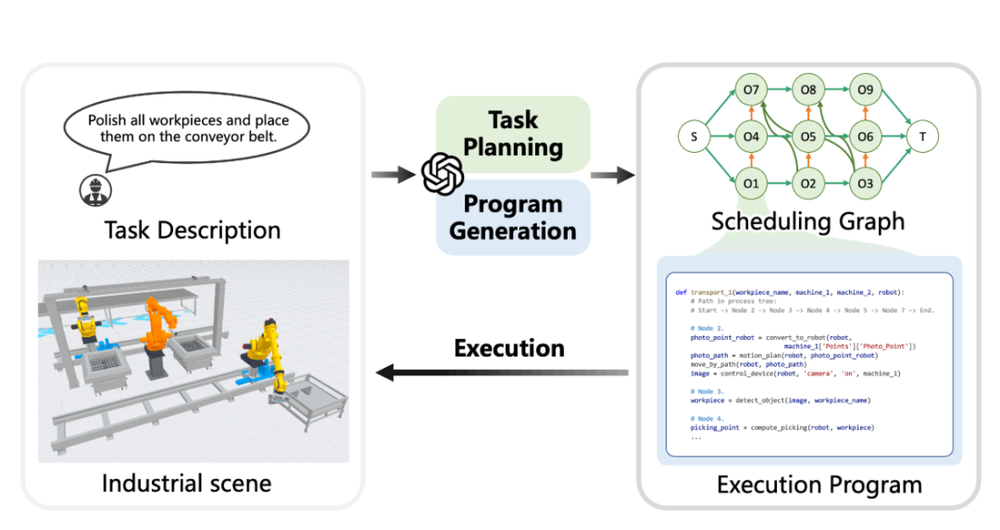
这项研究针对的是工业多机器人协同作业逻辑约束复杂,普通大模型很难胜任调度规划的问题。
所以该团队推出了IMR-LLM大模型调度框架,先靠大模型搭建任务逻辑图算出最优整体方案,再依托流程树生成机器人可执行程序,另外,团队还配套搭建了分层工业机器人测试数据集,实测综合性能远超现有方案。
北京航空航天大学全权教授团队的《Planar-Sector LOS Guidance for Interception of Agile Targets with Robotics Lifting-Wing Quadcopters》拿到了最佳野外与服务机器人论文奖。
这项研究关注的是一个现实难题:如何让无人机稳定追踪并拦截高速、不可预测移动的目标。
在搜救、安防等场景中,目标经常会突然转向或加速,传统制导方法容易失效。为此,团队提出了一种新的「平面扇区视线(Planar-Sector LOS)」制导方法,让带升力翼的四旋翼无人机能够根据目标动态持续调整飞行路径,在保持高速机动性的同时提升拦截稳定性。
实验结果显示,该方法能够帮助无人机在复杂环境中完成对高机动目标的精准追踪与远距离拦截。
上海科技大学肖晨曦团队的《ETac:A Lightweight and Efficient Tactile Simulation Framework for Learning Dexterous Manipulation》拿到了最佳学生论文奖。
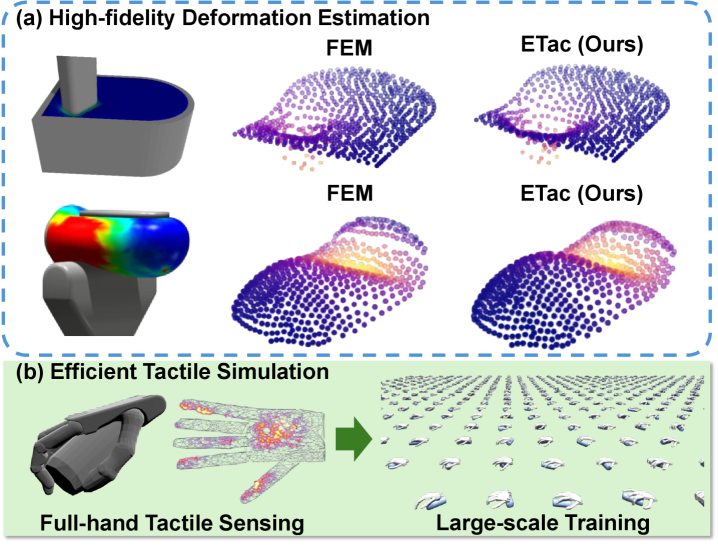
该工作所针对的问题是:许多装触觉传感器的灵巧手在做柔性触觉仿真时,仿真逼真度和运行速度很难两全,靠触觉数据训练抓取算法非常费力。
因此团队做了ETac触觉仿真工具,用轻量化模型模拟软体受压变形,效果接近专业有限元仿真,还能还原真实触觉传感器数据。一张4090显卡能同时跑4096个仿真场景,每秒869帧。只用触觉不靠视觉训练抓取模型,四类物体抓取成功率84.45%,可以低成本大规模训练机器人触觉操作技能。
数据仍是核心挑战,但并非万能
进入到2026年后,整个具身行业关于数据的讨论越来越多,大语言模型因为海量的数据最终获得成功,而机器人仍然困在数据短缺的瓶颈中,因此整个行业也在探索各种各样的方式进行采集数据,这也是近段时间来机器人发展的主线。
在这届ICRA中,UC Berkeley教授Ken Goldberg发表了最新演讲,也重点谈到了数采、数据飞轮等相关的话题。

关于行业都在期待的机器人领域ChatGPT时刻,Ken Goldberg表示自己基本同意,数据会像成就大语言模型(LLM)那样解决机器人问题,但问题的关键就在于何时才能解决。
他提出了一个非常悬殊的对比,用人类平均阅读速度来算的话,读完训练LLM所用的全部数据大概要用10万年,而机器人领域,只有大概几年的规模。
机器人领域的数据规模和LLM相比,有着非常巨大的鸿沟,许多人都相信只要数据充足,机器人模型的问题就会迎刃而解。
而Ken Goldberg对于这样理解并不完全同意,他认为仅靠数据远远不够,传统工程仍然非常重要,大量的工程设计、模块化系统和细致调试,再加上数据,是让系统真正运行起来的关键。
最后,相对于仿真合成数据、遥操等获取数据的方式,Ken Goldberg重点强调了真实生产环境中产生的数据,即让机器人应用部署,在部署中收集工作数据。
而这其实也是目前全球许多厂商都在发力的方向,数据飞轮:机器人大量落地部署、部署时产生真实数据,反馈后优化模型,好的模型再反过来促进机器人的高质量落地。
三个重要趋势
经过一整年行业的发展,在今年的ICRA中,可以感受到一个明显的变化是,具身智能行业正在从单点能力转向重落地的全栈类规模化能力。
在这个过程中,物理AI成为了统一叙事。
物理AI强调的不是让机器人完成某项具体任务,如何让AI学会理解真实物理世界是更重要的问题。
尤其是在过去一年中,大家开始更加关注机器人的任务能力,如何泛化到真实的物理世界当中。
于是世界模型、VLA、Sim2Real、真实部署数据等关键词,也在今年ICRA中频繁出现。
某种意义上,机器人正在经历自己的大模型时刻,行业开始正在加速去做一个能持续学习、持续泛化的物理AI系统。
数据的规模化扩展成为核心
在历届ICRA中,数据都从来没有像今年这届一样拥有如此之高的关注度,在数据严重短缺的共识下,行业也在探索如何低成本规模化生产真实数据。
当行业开始加速追求泛化能力时,机器人的数据缺口会被进一步放大,行业也在这种数据持续短缺的背景下,同时押注遥操作、真机部署、人类数据、仿真等多种数据路径。
越来越多企业开始建立数据工厂,采集真实操作数据,同时推动机器人进入工厂、物流、零售等场景,希望通过真实部署形成数据飞轮。

另一边则在仿真数据生成层面,从最佳论文OmniRetarget,到灵巧操作领域的大规模触觉仿真,都在试图解决同一个问题,如何让少量真实数据,扩展出足够大的训练规模。
灵巧操作竞争进入白热化阶段
今年来,灵巧操作正成为机器人领域竞争最激烈的主战场之一。
对于机器人来说,走路只是移动能力,真正决定生产力的,仍然是双手。
无论是工厂装配、家庭整理、物流分拣,还是工业维修,本质上都离不开抓、拧、按、插、搬等动作。这些看似简单的动作,对于机器人其实非常困难。
因为灵巧操作不仅需要视觉理解,还涉及到力控、触觉反馈、接触建模等复杂技术,所以最佳学生论文ETac的高效触觉仿真,大量关于灵巧手、双臂协作、复杂manipulation的workshop,都在机器人如何真正获得「手感」层面花了大量时间研究。
相比较简单的抓取和搬运,行业开始更强调复杂精细的操作类任务,这些能力对于机器人落地真实生活来说绕不过去,并且也很可能也是未来两年,具身智能最卷、最关键的一条主线。
写在最后
把过去几年机器人行业的发展看作一场长跑的话,ICRA 2026算是一个非常特殊的节点。
在一轮资本、创业公司和产业资源的快速涌入之后,关于具身行业未来所要解决的问题,大家已经形成了相对清晰的认知。
机器人行业也变得更加务实,大家所关注的问题也开始具体,模型怎样泛化到陌生环境、数据怎么规模化获取、灵巧操作如何提升成功率。
很多问题并不性感,甚至有些琐碎。
但从某种程度上来看,这正是行业在加速往前走的信号。
因为真正进入现实世界后,机器人所面对的就是一连串具体、复杂,又绕不过去的问题。
而今年的ICRA,也正在越来越多地围绕这些看似细碎的问题展开。