
本文来自微信公众号: 电动汽车观察家 ,作者:邱锴俊,编辑:章涟漪
自动驾驶系统安全的强制国标,要来了。
6月16日,工信部科技司发布公示,对《智能网联汽车自动驾驶系统安全要求》(下称《自动驾驶安全标准》)征求意见。
需要注意的是,《自动驾驶安全标准》是强制性标准,计划于2027年7月1日开始执行。届时,所有L3和/或L4级自动驾驶乘用车和卡车,都必须符合这一标准。
《自动驾驶安全标准》公示征求意见之后,就有媒体称,L3必须摄像头+毫米波雷达;L4必须摄像头+毫米波雷达+激光雷达。这也遭到“视觉派”小鹏汽车的副总裁于涛的批驳。
确实,查看《自动驾驶安全标准》全文,并未对感知设备类型做具体要求,而只是对其效果提要求,比如必须能够识别当前是否符合自动驾驶运行条件,必须预判环境风险,必须应对盲区、遮挡带来的感知缺失……
另外,在附录B中,该标准还对L3级高速场景,提出了专属的量化感知硬指标,包括侧向左右各9m探测宽度,以及分车速阶梯前向最小探测距离(60/80/100/120km/h对应50/60/100/130m)等等。
至于车企通过什么感知设备来达到这些指标,也未做要求。
除了这一争议事项,《自动驾驶安全标准》还有很多重要内容。
01
自动驾驶≥较好的司机
《自动驾驶安全标准》最重要的一句话是——
“ADS的安全水平应至少达到正在承担驾驶任务的合格且专注驾驶人的水平。”
这啥意思?
还好,编制说明做了解释:
“合格且专注驾驶人”的内涵是:
具有较好驾驶能力的驾驶人。
《自动驾驶安全标准》就以“较好的司机”来要求自动驾驶的一系列执行水平。
比如,当碰撞不可避免时,自动驾驶应降低事故伤害或损失。
如何判断“碰撞不可避免”,《自动驾驶安全标准》就是以“较好的司机”的水平为基线。
有意思的是,《自动驾驶安全标准》还要求,车企必须证明,他们的自动驾驶达到了“较好的司机”的水平。
标准中,对车企设计开发管理提出要求,必须开展各种分析,以人类合格驾驶人能力作为安全接受基准,写入安全档案。
在安全档案有关要求中,标准要求车企,必须提供仿真/场地/道路试验数据,证明其自动驾驶的整体风险、各类场景表现不劣于合格专注人类驾驶员;检验机构要核验证据是否满足该基线……
从这些表述,大众可能需要认清的是,自动驾驶有望大幅减少事故,提升驾驶安全,但是,自动驾驶≠零事故,自动驾驶≠安全。
02
当L3要求接管,如何确保安全?
有很多业界和学界人士主张,应该跳过L3,直接做L4——像何小鹏、周光、沈劭劼、欧阳明高、朱西产等等。
他们的理由之一,就是L3在能力不足时,要求司机介入,司机很可能无法接管,导致更严重的事故。
那么,《自动驾驶安全标准》如何确保L3无法执行自动驾驶任务时的安全?
标准的制定思路,首先还是确保用户有充分能力、时间来接管。
标准要求:
首先,要持续评估后援用户是否具备接管能力;
其次,当检测到后援用户不具备接管能力时,执行有效控制策略以使其恢复接管能力——这里指的是一系列的声、光、触觉提示;
第三,当不能使后援用户安全地恢复接管能力时,执行ADS后援响应并使车辆达到MRC(最小风险状态,比如靠边停车);
第四,若发出介入请求,确保预留充分时间,以便后援用户感知到介入请求并安全接管。
其中的第三步,如果用户就是没有接管,L3自动驾驶需要执行最小风险策略,使车辆达到最小风险状态。
关于第四步,标准提出,对于可预见的不符合自动驾驶运行条件的情况,还应能预判。
同样在第四步,标准要求,L3的介入请求从发出到因执行最小风险策略而终止的时长不少于10秒,使用户有充足的时间接管车辆。
怎么做,以及怎样才算最小风险状态?
标准认为:
应该能执行换道控制;
应该最小化对用户和道路其他使用者的安全风险;
应该将车辆移至不妨碍交通的道路边侧安全静止,当车辆严重失效或ADS严重失效导致无法安全移至道路边侧,至少使车辆在本车道安全静止;
在执行最小风险策略过程中和使车辆达到最小风险状态后,用户还是可以干预和退出;
在自动驾驶执行最小风险策略和达到最小风险状态后,都要合理使用危险警告信号;
如果自动驾驶将车辆达到了最小风险状态,用户想再激活自动驾驶,必须重启动力系统。
总结来说,L3一直就在监控用户能否接管;对于计划接管事件要有预见性;如果提出接管要求,会给足时间;如果用户没接管,也会有最小风险策略。
这些要求,从字面上看是闭环了,但对于L3“怀疑论者”,可能说服力还是不太够。
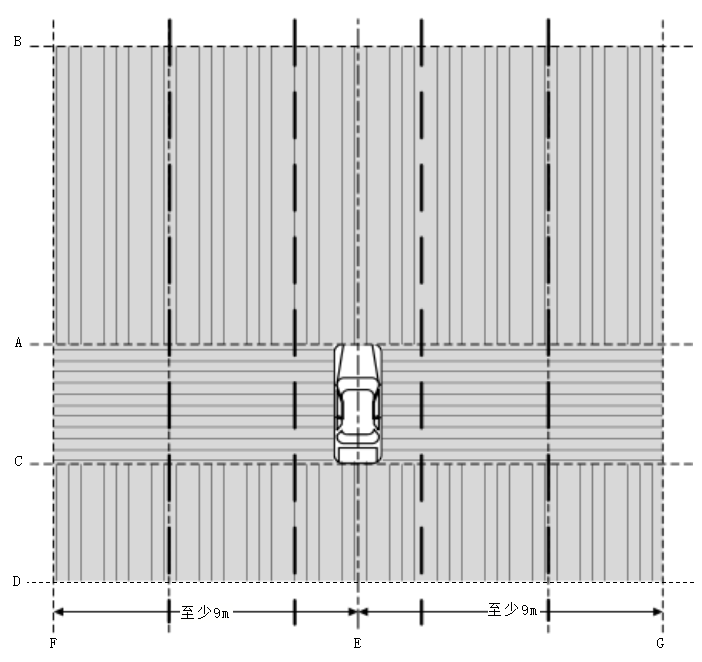
L3级自动驾驶感知范围要求
A——装备ADS的车辆最前端位置的平行线;
B——装备ADS的车辆感知系统的前向探测范围的平行线;
C——装备ADS的车辆最后端位置的平行线;
D——装备ADS的车辆感知系统的后向探测范围的平行线;
E——装备ADS的车辆中心线;
F——装备ADS的车辆感知系统从前向到后向的左侧侧向探测范围的平行线,与E相距至少9m;
G——装备ADS的车辆感知系统从前向到后向的右侧侧向探测范围的平行线,与E相距至少9m。
03
L4:不能依赖远程协助
既然是L4,标准还是对其提出了相对L3更高的一些要求。
最核心的是,L4没有“后援”司机,必须自己处理所有的自动驾驶任务。无论是标称场景、风险场景、失效场景,L4都得自己来。
比如,如果在高速和城区道路之外运行,L4相对L3,还要有绕行前方障碍物而部分或全部驶入相邻车道、倒车和掉头的能力。
再比如,L3和L4都必须识别有优先通行权的车辆(救护车、消防车等)和交警指挥,但L3可以由用户接管,而L4必须自己执行。
在同样的最小风险策略中,L3的目标是开到道路边侧,而L4的目标是开到安全区域。
关于安全标准等级,标准对于L3的ASIL等级要求是B,对于L4则是D。
对于当前在运行的L4,大家都知道,背后都要远程协助,这不禁让人想,有问题,启动远程协助不就行了?
但标准的要求不是这样的。
在专门针对L4级自动驾驶的技术要求中,标准明确,L4级自动驾驶,不应依赖远程协助执行自动驾驶任务。远程协助过程中,自动驾驶应独立执行任务,且不对车内用户和其他道路使用者造成不合理的安全风险。
另外,有的L4会允许车内用户干预,标准对于这样的行为,给出了更高控制权的设定。
目前,L3和L4在国内都是在试点或者测试阶段,《自动驾驶安全标准》先行出台,会不会太早了?
标准制定部门认为,从实践来看,中国自动驾驶已经积累了大量的经验,并不是“闭门造车”。
另外,标准虽然会导致短期内企业成本有所上升,但从长期来看,通过提高产品质量、降低事故成本、实现规模效应等方式,能够有效抵消短期成本的增加,并带来额外的经济效益。同时,安全标准的实施对于保障公共安全、提升社会整体福利具有重要意义,其社会效益远远超过了企业短期成本的增加。
因此他们认为,该标准具有较高的可行性。该标准征求意见计划在6月24日结束。
实施日期计划是2027年7月1日,对于新申请车辆型式批准的车型,当时就实施,但对于已获得车辆型式批准的车型,计划给13个月过渡期。